- TOP
- ผลิตภัณฑ์
- ห้องปั๊มโลหะอัตโนมัติ
- ระบบหุ่นยนต์โอนถ่าย
- หน่วยการติดตั้ง/ถอดมือจับแบบ One-touch
หน่วยการติดตั้ง/ถอดมือจับแบบ One-touch
หุ่นยนต์ถ่ายโอนชิ้นงานระหว่างเครื่องเพรสของซีรีส์ RY ในปัจจุบันมีหน่วยติดตั้ง/ถอดมือจับแบบ One-touch หรือแบบสัมผัสเดียวแล้ว
ซึ่งจะช่วยลดระยะเวลาที่ต้องใช้ในการเปลี่ยนหน่วยมือจับในระหว่างการเตรียมงาน รวมถึงลดการใช้แรงงานเนื่องจากสามารถเปลี่ยนได้แบบไม่ต้องใช้เครื่องมือด้วยวิธีการยึดด้วยสลักเกลียว
คุณสมบัติ
-
- ไม่ต้องใช้เครื่องมือ! เปลี่ยนมือจับแบบ One-touch ด้วยปุ่มเพียงปุ่มเดียว
-

- ด้วยการขับเคลื่อนด้วยแรงดันอากาศทำให้ไม่จำเป็นต้องใช้แหล่งขับเคลื่อนไฮดรอลิก
-
- สามารถติดตั้งอุปกรณ์ต่อพ่วงส่วนมือจับ (ตัวยึด) ได้โดยวิธีการยึดด้วยสลักเกลียว
โปรดทราบว่าเมื่อใช้อุปกรณ์ต่อพ่วงส่วนมือจับ (ตัวยึด) จำเป็นต้องใช้อุปกรณ์ทรงกรวยพิเศษสำหรับบริเวณที่ตัดรูปตัว U
-
- เส้นทางของแรงดันสุญญากาศจะถูกเชื่อมต่อในระหว่างการติดตั้งโดยวิธีการยึดด้วยสลักเกลียวดังกล่าว
ในขณะที่รุ่นก่อนหน้านี้ จำเป็นต้องใช้ตัวเชื่อมต่อในการเดินสายแม่เหล็กสำหรับการติดตั้งด้วยมือ
ข้อมูลจำเพาะ
| รายการ | คำอธิบาย |
|---|---|
| กลไกความปลอดภัย | สปริงที่อยู่ด้านในของกระบอกสูบมีไว้เพื่อป้องกันชิ้นส่วนหลุดเมื่อการจ่ายอากาศลดลง ระบบตรวจจับการติดตั้งมือจับ (อุปกรณ์เสริม)/ระบบตรวจจับแรงดันอากาศ (อุปกรณ์เสริม) |
| แหล่งขับเคลื่อนสำหรับการถอดส่วนมือจับ | Air cylinder |
| แรงดันที่ใช้ | 0.7 (MPa) (มีการใช้บูสเตอร์วาล์ว) |
| การจ่ายอากาศต่ำสุด (แรงดันของแหล่งจ่าย) | 0.4 (MPa) |
| น้ำหนักที่เพิ่มขึ้นอย่างสัมพันธ์กันกับวิธีการยึดด้วยสลักเกลียว | 0.5 (kg) (มือจับ 1 หน่วย) *โปรดดูข้อ “4.” ด้านล่าง |
■หมายเหตุ
1. สามารถใช้ได้เฉพาะกับประเภท 3 RY-120 และ 1 RYN-120 ที่มีแกนป้อนรูปตัว T แบบไขว้เท่านั้น
2. ไม่สามารถใช้อุปกรณ์ต่อพ่วงส่วนมือจับ (ตัวยึด YCU10A, YCU10B) กับ RY-100 และ RY-080 ได้
3. เมื่อใช้อุปกรณ์ต่อพ่วงส่วนมือจับที่มีอยู่ (ตัวยึด YCU12A, YCU12B ฯลฯ) จำเป็นต้องใช้อุปกรณ์ทรงโคนพิเศษสำหรับบริเวณที่ตัดรูปตัว U โดยเฉพาะ
4. มือจับแต่ละหน่วยหนักประมาณ 0.5 kg ซึ่งหนักกว่ารุ่นก่อนหน้านี้ จึงอาจมีการสั่นสะเทือนมากกว่าในระหว่างการโอนถ่าย
5. เมื่อดัดแปลงอุปกรณ์ที่มีอยู่ ระยะในการหยุดชะงักของแม่พิมพ์อาจแตกต่างกันไปตามอุปกรณ์ของ Oriimec
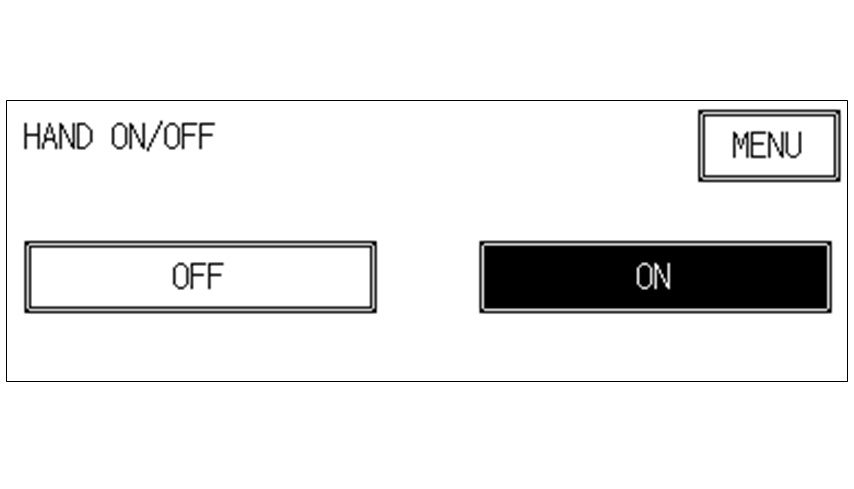
6. ทำงานโดยใช้หน้าจอระบบสัมผัสซึ่งเป็นอุปกรณ์แยกสำหรับ RYN120 (ประเภทเซอร์โวมอเตอร์) และปุ่มสวิตช์สำหรับ RY-120 (ประเภทขับเคลื่อนด้วยลูกเบี้ยว)
7. โปรดติดต่อตัวแทนจำหน่าย Oriimec หากคุณต้องการใช้การจับด้วยแคลมป์เป็นวิธีการยึดชิ้นงาน
8. ไม่สามารถใช้การจับด้วยแคลมป์ร่วมกับระบบตรวจจับการติดตั้งส่วนมือจับได้
9. ข้อมูลและภาพในคู่มือนี้เป็นงานต้นแบบ ลักษณะ, ข้อมูลจำเพาะ ฯลฯ อาจมีการเปลี่ยนแปลงโดยไม่แจ้งให้ทราบล่วงหน้า